
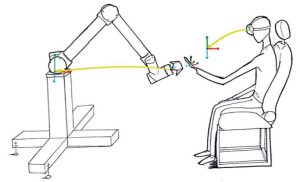
L’objectif scientifique du projet LobbyBot est de lever les freins interdisant aujourd’hui la mise en œuvre d’une ICI dans un contexte industriel. Ces freins se situent au niveau matériel, logiciel et IHM. Nous développerons dans ce cadre un prototype d’ICI basé sur un cobot pour répondre aux exigences de sécurité en cas de contact involontaire avec l’utilisateur. Les récentes avancées sur les cobots permettent en effet de disposer de robots présentant de faibles inerties, et un actionnement compatible avec le partage spatio-temporel d’espace de travail avec un humain. L’utilisateur sera immergé visuellement dans une simulation au moyen d’un casque de réalité virtuelle ou mixte. De ce fait, un système de restitution visuelle du corps de l’utilisateur dans le casque sera développé. Les contraintes quant aux exigences de fidélité du système n’étant pas pleinement connues au moment du lancement du projet, plusieurs pistes sont envisagées : scan 3D temps-réel à l’aide d’une caméra RGBD ou pilotage d’un avatar via un système de capture de mouvement. Des procédures de co-référencement, permettant d’exprimer les positions de chaque composant spatial du système (environnement virtuel, robot, système de visualisation, systèmes de capture de mouvement, accessoires physiques éventuels) dans le même repère devront par conséquent être développées. D’un point de vue commande, nous concevrons également des algorithmes qui tenteront de prédire l’activité de l’utilisateur lors d’une simulation. Cette prédiction sera basée sur une capture de mouvement de l’utilisateur et l’identification de points d’intérêt de l’environnement virtuel, et permettra de définir à la fois une consigne de localisation de l’ICI, et un ensemble de contraintes à respecter lors de la génération de la trajectoire permettant de l’atteindre. Contrairement à toutes les approches actuelles, ces contraintes tiendront compte du corps de l’utilisateur et des segments du robot dans leur intégralité, et pas uniquement de la main et de l’effecteur final du robot. Nous concevrons également un prop multi-facettes qui sera capable de présenter à l’utilisateur des surfaces de formes et de textures différentes. Des techniques d’interaction destinées à pallier les limitations inhérentes aux ICI seront également étudiées. Ces techniques d’interaction permettront le cas échéant de retarder et contrôler le déclenchement des actions de l’utilisateur en se basant sur la notion de distracteur. Elles mettront également en œuvre de retours pseudo-haptiques pour augmenter l’étendue des formes et des matériaux restituables. Enfin, des retours spécifiques (visuels, sonores, haptiques) seront proposés pour solutionner le problème de suivi d’une surface avec le doigt.